입력 2026.06.23 16:37
- 컴퓨터공학부 한연희 교수 연구팀, 로보틱스 세계적 국제학술대회 ‘IROS 2026’ 논문 채택
-‘25년에도 강화학습 기반 드론 제어 연구로 채택···2년 연속 성과

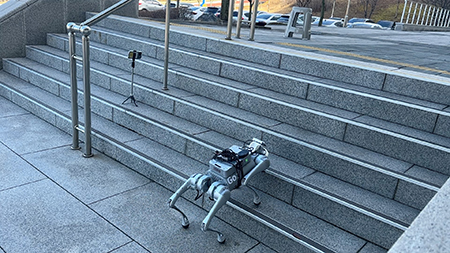

한국기술교육대학교(KOREATECH·총장 유길상) 컴퓨터공학부 한연희 교수 연구팀이 ‘깊이 영상(depth image)의 센서 노이즈에 강인한 사족보행 로봇 파쿠르*기술’ 개발에 성공했다.
* 파쿠르: 계단, 틈, 단차 등 장애물을 걷거나 뛰어넘으며 통과하는 동작
깊이 영상은 카메라와 물체 사이의 거리 정보를 픽셀 단위로 담은 영상으로, 로봇이 계단·틈·단차·장애물 등 주변 지형의 3차원 구조를 파악하는 데 활용된다. 이번 연구의 핵심은 실제 환경에서 발생하는 깊이 영상의 노이즈 영향을 줄여, 로봇이 장애물을 안정적으로 통과하도록 한 데 있다.
이번 논문은 로봇공학·자율주행·지능형 시스템 분야를 대표하는 국제학술대회 ‘IROS 2026’ (IEEE/RSJ International Conference on Intelligent Robots and Systems)에 ‘DAWN: Noise-Robust Quadruped Parkour via Depth-Denoising World Models’라는 제목으로 채택됐다. 논문은 2026년 9월 27일부터 10월 1일까지 미국 펜실베이니아주 피츠버그에서 발표될 예정이다.